动态规划1:从爬楼梯问题开始
前言
动态规划(Dynamic Programming,简称DP)是算法设计中的一种重要思想,它通过将复杂问题分解为子问题,并存储子问题的解来避免重复计算,从而提高算法效率。
作为动态规划系列的第一篇文章,我们将从最经典的入门题目——LeetCode第70题”爬楼梯”开始,深入理解动态规划的核心思想。
什么是动态规划?
动态规划的核心思想是:将一个问题分解为若干个子问题,通过求解子问题并保存其结果,避免重复计算,最终得到原问题的解。
动态规划通常具备以下特征:
- 最优子结构:问题的最优解可以通过子问题的最优解来构造
- 重叠子问题:在求解过程中,同一个子问题会被多次计算
- 无后效性:一旦确定某阶段的状态,则此后过程的演变不再受此前各种状态及决策的影响
LeetCode 70. 爬楼梯
题目描述
假设你正在爬楼梯。需要 n 阶你才能到达楼顶。
每次你可以爬 1 或 2 个台阶。你有多少种不同的方法可以爬到楼顶呢?
示例 1:
1 | 输入:n = 2 |
示例 2:
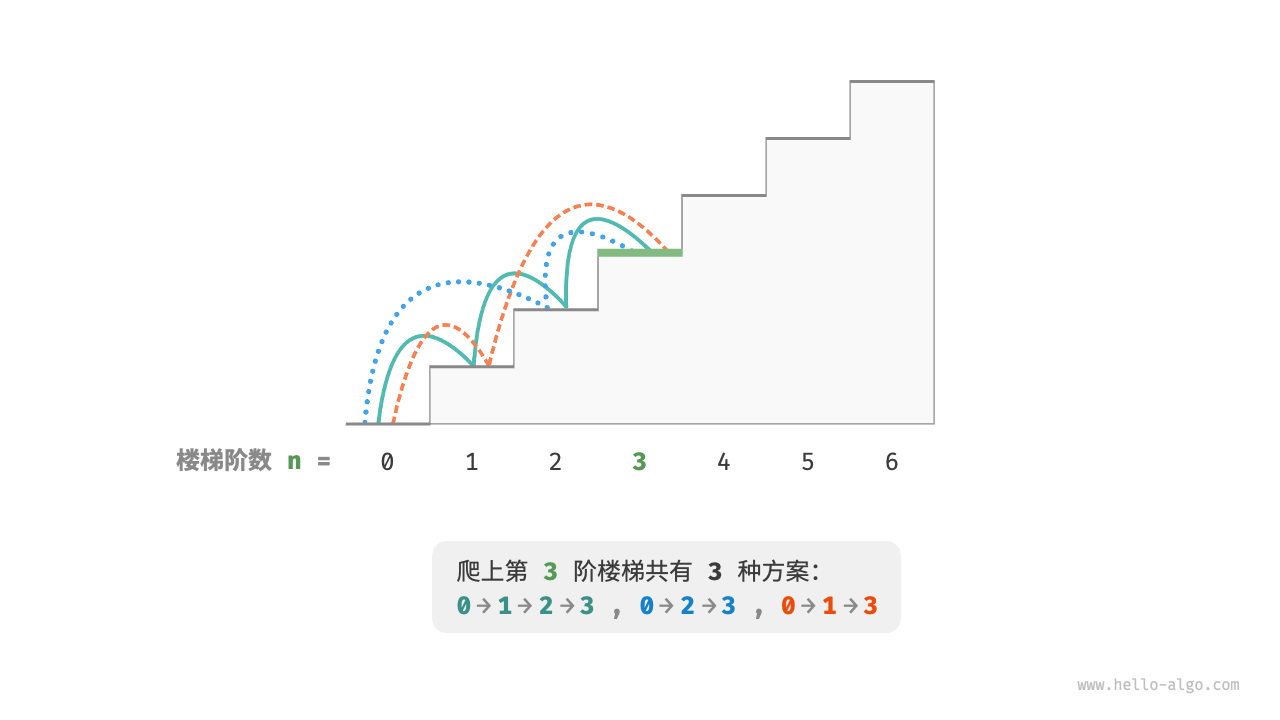
1 | 输入:n = 3 |
思路分析
这是一个典型的动态规划问题。让我们一步步分析:
1. 寻找状态转移方程
要到达第 n 阶台阶,我们只能从第 n-1 阶或第 n-2 阶到达:
- 从第
n-1阶走 1 步 - 从第
n-2阶走 2 步
因此,到达第 n 阶的方法数 = 到达第 n-1 阶的方法数 + 到达第 n-2 阶的方法数
状态转移方程:f(n) = f(n-1) + f(n-2)
2. 确定初始状态
f(1) = 1:到达第1阶只有1种方法f(2) = 2:到达第2阶有2种方法(1+1 或 2)
3. 递推求解
通过状态转移方程,我们可以从初始状态开始,逐步计算到 f(n)。
解法实现
方法一:递归(会超时)
1 | def climbStairs(n): |
时间复杂度: O(2^n) - 存在大量重复计算
空间复杂度: O(n) - 递归栈深度
方法二:动态规划(一维数组)
1 | def climbStairs(n): |
时间复杂度: O(n)
空间复杂度: O(n)
方法三:空间优化的动态规划
1 | def climbStairs(n): |
时间复杂度: O(n)
空间复杂度: O(1)
Java版本实现
1 | public class Solution { |
执行过程演示
让我们以 n = 5 为例,演示动态规划的计算过程:
1 | f(1) = 1 |
所以爬到第5阶有8种不同的方法。
动态规划的解题步骤
通过这个例子,我们可以总结出动态规划的一般解题步骤:
- 定义状态:确定用什么来表示一个子问题
- 找状态转移方程:子问题之间的递推关系
- 确定初始状态和边界情况:递推的起点
- 确定计算顺序:保证计算某个状态时,依赖的状态已经计算出来
- 空间优化(可选):如果只依赖前几个状态,可以用滚动数组优化空间
举一反三
爬楼梯问题实际上就是斐波那契数列的变形。类似的问题还有:
- LeetCode 198. 打家劫舍:每间房屋都有一定金额,不能连续偷相邻房屋
- LeetCode 746. 使用最小花费爬楼梯:每一阶都有花费,求最小花费到达顶部
- LeetCode 509. 斐波那契数:直接求斐波那契数列第n项
总结
爬楼梯问题是动态规划的经典入门题目,它帮助我们理解了:
- 如何识别动态规划问题的特征
- 如何找到状态转移方程
- 如何进行空间优化
- 动态规划相比递归的优势
在下一篇文章中,我们将继续探讨更复杂的动态规划问题,包括二维DP、背包问题等。敬请期待!
相关链接:
标签: #动态规划 #算法 #LeetCode #面试必备
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 DevGobang!
相关推荐
2025-09-15
动态规划10:通配符匹配问题
前言在动态规划系列的前九篇文章中,我们分别学习了爬楼梯问题、最长公共子序列、01背包问题、最长递增子序列、不同路径问题、股票买卖问题、编辑距离问题、回文子串问题和区间DP问题。 今天我们将探讨动态规划中另一个经典的字符串匹配问题——通配符匹配问题。这个问题在文件系统、正则表达式、数据库查询等领域都有广泛应用,是理解模式匹配算法的重要基础。 问题描述通配符匹配问题的核心是判断一个字符串是否能匹配一个包含通配符的模式。 基本规则 '?' 匹配任何单个字符 '*' 匹配任意数量的字符(包括零个) 其他字符必须精确匹配 问题定义给定一个字符串 s 和一个字符模式 p,实现一个支持 '?' 和 '*' 匹配的通配符匹配。 示例: 123456输入: s = "adceb", p = "*a*b*"输出: true解释: 第一个 '*' 匹配空字符串, 第二个 '*' 匹配 "dce".输入: s = "acdcb&q...
2025-09-07
动态规划4:最长递增子序列问题
引言在动态规划系列的前三篇文章中,我们分别学习了爬楼梯问题、最长公共子序列和01背包问题。今天我们将探讨另一个动态规划的经典问题——最长递增子序列(Longest Increasing Subsequence,LIS)。 最长递增子序列问题不仅是动态规划的核心问题之一,更是算法优化思想的绝佳体现。从朴素的O(n²)动态规划解法,到巧妙的O(nlogn)优化算法,这个问题展现了算法设计的精妙之处。 问题定义什么是递增子序列?递增子序列:从原数组中按照原有顺序选取若干元素,使得这些元素严格递增。 注意几个关键点: 保持原有顺序:不能改变元素在原数组中的相对位置 严格递增:后面的元素必须大于前面的元素 不要求连续:子序列的元素在原数组中可以不相邻 最长递增子序列问题给定一个整数数组,找到其中最长递增子序列的长度。 经典例题:LeetCode 300. 最长递增子序列 1234567891011121314示例 1:输入:nums = [10,9,2,5,3,7,101,18]输出:4解释:最长递增子序列是 [2,3,7,18],因此长度为 4。示例 2:输入:nums = [0...
2025-09-08
动态规划5:不同路径问题与路径计数
引言在动态规划系列的前四篇文章中,我们分别学习了爬楼梯问题、最长公共子序列、01背包问题和最长递增子序列。今天我们将探讨动态规划的另一个重要分支——路径计数问题。 路径计数问题是动态规划中非常重要的一类问题,它不仅在算法面试中频繁出现,还与组合数学紧密相关。通过学习这类问题,我们能够深入理解动态规划在计数问题中的应用。 问题背景路径计数问题的核心思想是:在一个给定的空间中,计算从起点到终点的不同路径数量。这类问题通常具有以下特征: 方向限制:只能向特定方向移动(如向右、向下) 路径唯一性:每条路径由一系列移动步骤组成 计数目标:求所有可能路径的数量 经典例题一:不同路径问题描述LeetCode 62. 不同路径 一个机器人位于一个 m x n 网格的左上角。机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角。问总共有多少条不同的路径? 1234567891011示例 1:输入:m = 3, n = 7输出:28示例 2:输入:m = 3, n = 2输出:3解释:从左上角开始,总共有 3 条路径可以到达右下角。1. 向右 -> 向下 -> 向下2....
2025-09-12
动态规划6:股票买卖问题
引言在动态规划系列的前五篇文章中,我们分别学习了爬楼梯问题、最长公共子序列、01背包问题、最长递增子序列和不同路径问题。今天我们将探讨动态规划中极具实用价值的一类问题——股票买卖问题。 股票买卖问题是动态规划中的经典应用,它不仅在算法面试中频繁出现,更与实际的投资决策密切相关。通过学习这类问题,我们将深入理解状态机动态规划的设计思想和实现技巧。 问题背景股票买卖问题的核心在于:在给定的股票价格序列中,通过买入和卖出操作获得最大利润。 这类问题通常具有以下特征: 时间序列:股票价格按时间顺序给出 操作限制:买入卖出有各种限制条件 状态转换:持有股票和不持有股票是两种不同的状态 最优化目标:追求最大利润 问题分类与解法股票买卖问题根据交易限制可以分为几大类,我们将逐一分析: 类型一:买卖股票的最佳时机(只能交易一次)LeetCode 121. 买卖股票的最佳时机 问题描述给定一个数组 prices,它的第 i 个元素 prices[i] 表示一支给定股票第 i 天的价格。你只能选择某一天买入这只股票,并选择在未来的某一天卖出该股票。设计一个算法来计算你所能获取的最大利润。 1...
2025-09-13
动态规划7:编辑距离问题
引言在动态规划系列的前六篇文章中,我们分别学习了爬楼梯问题、最长公共子序列、01背包问题、最长递增子序列、不同路径问题和股票买卖问题。今天我们将探讨动态规划中另一个重要且实用的问题——编辑距离问题。 编辑距离(Edit Distance),也称为Levenshtein距离,是衡量两个字符串相似度的重要指标。它在文本处理、DNA序列分析、拼写检查、机器翻译等领域有着广泛的应用。通过学习这个问题,我们将深入理解动态规划在字符串处理中的强大能力。 问题定义什么是编辑距离?编辑距离:将一个字符串转换为另一个字符串所需的最少编辑操作次数。 允许的编辑操作包括: 插入(Insert):在字符串中插入一个字符 删除(Delete):从字符串中删除一个字符 替换(Replace):将字符串中的一个字符替换为另一个字符 经典例题LeetCode 72. 编辑距离 给你两个单词 word1 和 word2,请你计算出将 word1 转换成 word2 所使用的最少操作数。 1234567891011121314151617示例 1:输入:word1 = "horse", ...
2025-09-14
动态规划8:回文子串问题
引言在动态规划系列的前七篇文章中,我们分别学习了爬楼梯问题、最长公共子序列、01背包问题、最长递增子序列、不同路径问题、股票买卖问题和编辑距离问题。 今天我们将探讨动态规划中又一个经典的字符串问题——回文子串问题。回文字符串具有独特的对称性质,在文本处理、密码学、生物信息学等领域都有重要应用。通过学习这个问题,我们将掌握多种不同的算法思想和优化技巧。 问题定义什么是回文字符串?回文字符串:正读和反读都相同的字符串。 例如: 单个字符:"a"、"b"(都是回文) 对称字符串:"aba"、"abcba" 偶数长度:"abba"、"aa" 经典例题我们将围绕以下几个经典问题展开讨论: LeetCode 5. 最长回文子串 LeetCode 647. 回文子串 LeetCode 516. 最长回文子序列 问题一:最长回文子串问题描述给你一个字符串 s,找到 s 中最长的回文子串。 12345678示例 1:输入:s = "babad"输出...

